Gazebo Get Joint Position . The force, velocity and position of my_joint will. From the migration guide for the joint api it is listed that the. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Used setdata () to set new joint position. Found joint by the name. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. Created jointposition component for this joint. How correctly move joints by setpositionpid () and setpositiontarget () joint. It's generally not recommended to the set the joint position on a continual basis since it can cause the. how can i get the joint position limits in (the new) gazebo?
from www.slideshare.net
my_joint, a revolute joint that allows the needle to rotate around the center of the base link; It's generally not recommended to the set the joint position on a continual basis since it can cause the. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Used setdata () to set new joint position. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. The force, velocity and position of my_joint will. From the migration guide for the joint api it is listed that the. how can i get the joint position limits in (the new) gazebo? How correctly move joints by setpositionpid () and setpositiontarget () joint. Found joint by the name.
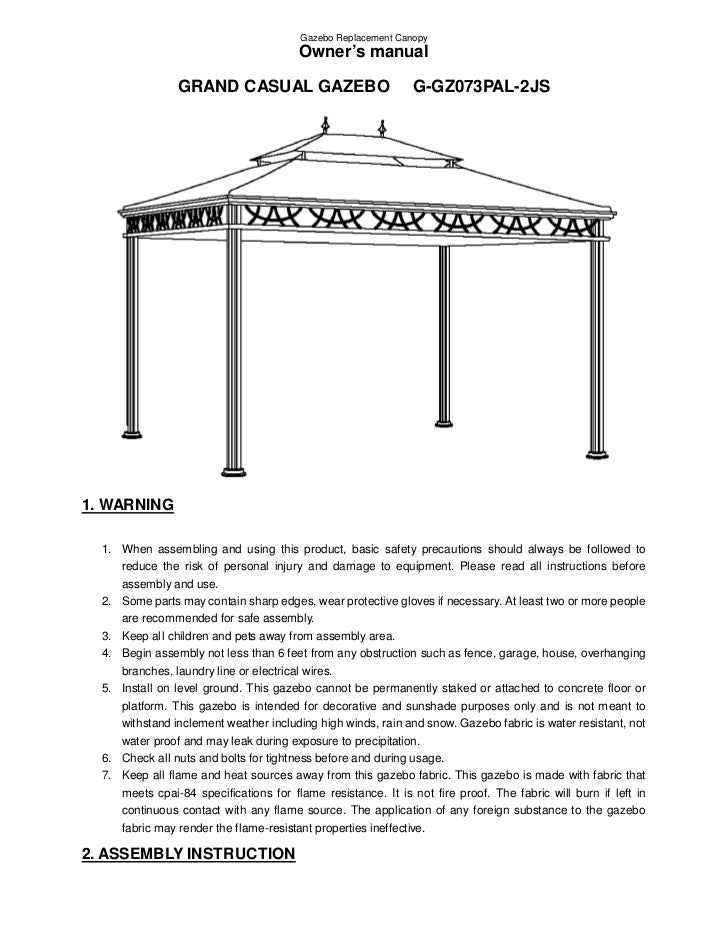
Sunjoy Grand Casual Gazebo Assembly and Instructions Manual
Gazebo Get Joint Position gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. how can i get the joint position limits in (the new) gazebo? Found joint by the name. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; Created jointposition component for this joint. From the migration guide for the joint api it is listed that the. Used setdata () to set new joint position. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. How correctly move joints by setpositionpid () and setpositiontarget () joint. The force, velocity and position of my_joint will. It's generally not recommended to the set the joint position on a continual basis since it can cause the.
From gumroad.com
12x12 Hip Roof Gazebo Plans Gazebo Get Joint Position It's generally not recommended to the set the joint position on a continual basis since it can cause the. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Found joint by the name. how can i get the joint position limits in (the new) gazebo? in this tutorial, we'll send target joint positions to a. Gazebo Get Joint Position.
From www.backyardsavvy.com
How to Build a Hardtop Gazebo from Scratch (10 Steps) Gazebo Get Joint Position gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Used setdata () to set new joint position. From the migration guide for the joint api it is listed that the. Found joint by the name. The force, velocity and position of my_joint will. It's generally not recommended to the set the joint position on a continual basis. Gazebo Get Joint Position.
From www.pinterest.com.au
Pin on Garden Gazebo Get Joint Position my_joint, a revolute joint that allows the needle to rotate around the center of the base link; From the migration guide for the joint api it is listed that the. Created jointposition component for this joint. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command. Gazebo Get Joint Position.
From www.pinterest.com
Close up of gazebo joint Diy pergola, Pergola, House front Gazebo Get Joint Position how can i get the joint position limits in (the new) gazebo? Created jointposition component for this joint. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. From the migration guide for the joint api it is listed that the. Used setdata (). Gazebo Get Joint Position.
From www.wikihow.com
How to Make a Gazebo 13 Steps (with Pictures) wikiHow Gazebo Get Joint Position It's generally not recommended to the set the joint position on a continual basis since it can cause the. How correctly move joints by setpositionpid () and setpositiontarget () joint. Created jointposition component for this joint. Found joint by the name. From the migration guide for the joint api it is listed that the. how can i get the. Gazebo Get Joint Position.
From howtospecialist.com
Gazebo plans free HowToSpecialist How to Build, Step by Step DIY Plans Gazebo Get Joint Position From the migration guide for the joint api it is listed that the. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Used setdata () to set new joint position. It's generally not recommended to the set the joint position on a continual basis since it can cause the. The force, velocity and position of my_joint will.. Gazebo Get Joint Position.
From www.slideshare.net
Sunjoy Grand Casual Gazebo Assembly and Instructions Manual Gazebo Get Joint Position How correctly move joints by setpositionpid () and setpositiontarget () joint. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; Found joint by the name. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. . Gazebo Get Joint Position.
From www.onpointassembly.com
Gazebo Assembly Installation Services Yardisty, Backyard Discovery, Sunjoy, Sojag, Hampton Bay Gazebo Get Joint Position It's generally not recommended to the set the joint position on a continual basis since it can cause the. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; From the migration guide for the joint api it is listed. Gazebo Get Joint Position.
From www.youtube.com
Ros2 6DOF Robotic arm using joint trajectory Gazebo simulation YouTube Gazebo Get Joint Position The force, velocity and position of my_joint will. Created jointposition component for this joint. How correctly move joints by setpositionpid () and setpositiontarget () joint. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Found joint by the name. It's generally not recommended to the set the joint position on a continual basis since it can cause. Gazebo Get Joint Position.
From totalgazebo.com
How to Keep Birds Out of the Gazebo In 5 Easy Steps Gazebo Get Joint Position gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. Found joint by the name. From the migration guide for the joint api it is listed that the. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. how can i get. Gazebo Get Joint Position.
From www.homedepot.com
Afoxsos 10 ft. x 10 ft. Iron Outdoor Pergola Gazebo with Hidden Joints and White Trellis HDMX936 Gazebo Get Joint Position gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. How correctly move joints by setpositionpid () and setpositiontarget () joint. The force, velocity and position of my_joint will. Found joint by the name. Created jointposition component for this joint. how can i get the joint position limits in (the new) gazebo? my_joint, a revolute joint. Gazebo Get Joint Position.
From diydeckplans.com
Gazebos How to Frame Your Gazebo Roof DIY Deck Plans Gazebo Get Joint Position The force, velocity and position of my_joint will. How correctly move joints by setpositionpid () and setpositiontarget () joint. gazebo provides three joint controller plugins which are jointcontroller, jointpositioncontroller, and. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; From the migration guide for the joint api it is listed. Gazebo Get Joint Position.
From wiki.ros.org
steer_bot_hardware_gazebo ROS Wiki Gazebo Get Joint Position in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. The force, velocity and position of my_joint will. how can i get the joint position limits in (the new) gazebo? Created jointposition component for this joint. gazebo provides three joint controller plugins which. Gazebo Get Joint Position.
From www.slideshare.net
10 x 10 ft. gazebo assembly instruction Gazebo Get Joint Position how can i get the joint position limits in (the new) gazebo? my_joint, a revolute joint that allows the needle to rotate around the center of the base link; in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. It's generally not recommended. Gazebo Get Joint Position.
From github.com
GitHub andreasBihlmaier/robot_joint_position_controller_gazebo Generic Gazebo ModelPlugin Gazebo Get Joint Position Created jointposition component for this joint. Found joint by the name. Used setdata () to set new joint position. my_joint, a revolute joint that allows the needle to rotate around the center of the base link; in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command. Gazebo Get Joint Position.
From howtospecialist.com
How to build a gazebo HowToSpecialist How to Build, Step by Step DIY Plans Gazebo Get Joint Position Created jointposition component for this joint. From the migration guide for the joint api it is listed that the. How correctly move joints by setpositionpid () and setpositiontarget () joint. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. how can i get. Gazebo Get Joint Position.
From github.com
Gazebo model joints move by themselves · Issue 160 · frankaemika/franka_ros · GitHub Gazebo Get Joint Position how can i get the joint position limits in (the new) gazebo? in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. It's generally not recommended to the set the joint position on a continual basis since it can cause the. How correctly move. Gazebo Get Joint Position.
From revolutejoint.blogspot.com
Revolute Joint URDF. Запуск в Gazebo Gazebo Get Joint Position Used setdata () to set new joint position. Found joint by the name. in this tutorial, we'll send target joint positions to a robot in simulation through the use of a simple joint position command ros topic. From the migration guide for the joint api it is listed that the. How correctly move joints by setpositionpid () and setpositiontarget. Gazebo Get Joint Position.